
科技发展一日千里,GPS在好玩的同时,应用也逐渐深入,对她的要求也在逐渐提高,为了能够更好地发挥GPS的作用,希望驴友玩家们都来谈谈体会和感受,分享一下。
雨川说过,独乐乐不如众乐乐。
 billzeng
·
2009-08-24 02:45
billzeng
·
2009-08-24 02:45
400T能将老地图拍成的JPG随意放大缩小这点功能非常实用.
billzeng
·
2009-08-24 03:50
关于GPS的高度校正,我使用的是60CSX,在登山前一般会选择一空旷地带确认收星信号好的情况下采用打点(MARK)平均值法测量所处位置的高度(见下图,这是在室内演示效果而已),在信号好的情况下,随着测量次数的增加,精度也会逐渐的提高,当达到一稳定精度后记录下当时高度,然后再校正GPS的气压计算高度.

在比较空旷的山顶也可以采用平均值法获得稍微精确的精度.
billzeng
·
2009-09-08 08:35
有人将60CSX拆开,说里面是四向螺丝天线(原来就是一个薄得像纸一样的圈圈!)
billzeng
·
2009-09-09 08:19
今天用MAPSEND LITE软件分析了跟风的“急升坡2009-09-06”轨迹中“急升坡”部分,发现软件分析与跟风GPS显示的数据差异较大。分析结果如下:
起点高程:112米
终点高程:252米
轨迹水平投影距离:321.7米
轨迹3D距离:387.1米
3D爬升距离:353.2米
3D下降距离:30.6米
爬升高程:149米
下降高程:9米
航程计时:9分42秒
平均航速:2公里/小时
如下图:
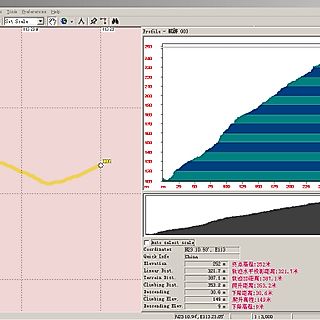
其中轨迹水平投影距离:321.7米与跟风GPS累计距离135米相差较大,不知道两者是否是同一概念。
或许我们会说,爬山时我一个劲的往上爬,没有下降啊,哪里来的下降距离呢?但如果我们把轨迹图放大一看,你会发现轨迹是锯齿状的,就象股票走势图一样,见下图:

我认为轨迹反映出来的上下波动很大因素是信号飘移造成的,尤其在树林中穿越常有信号不好的时候。
有机会去大草原上走走,看看那样的轨迹是否更平滑呢?
billzeng
·
2009-09-26 06:04
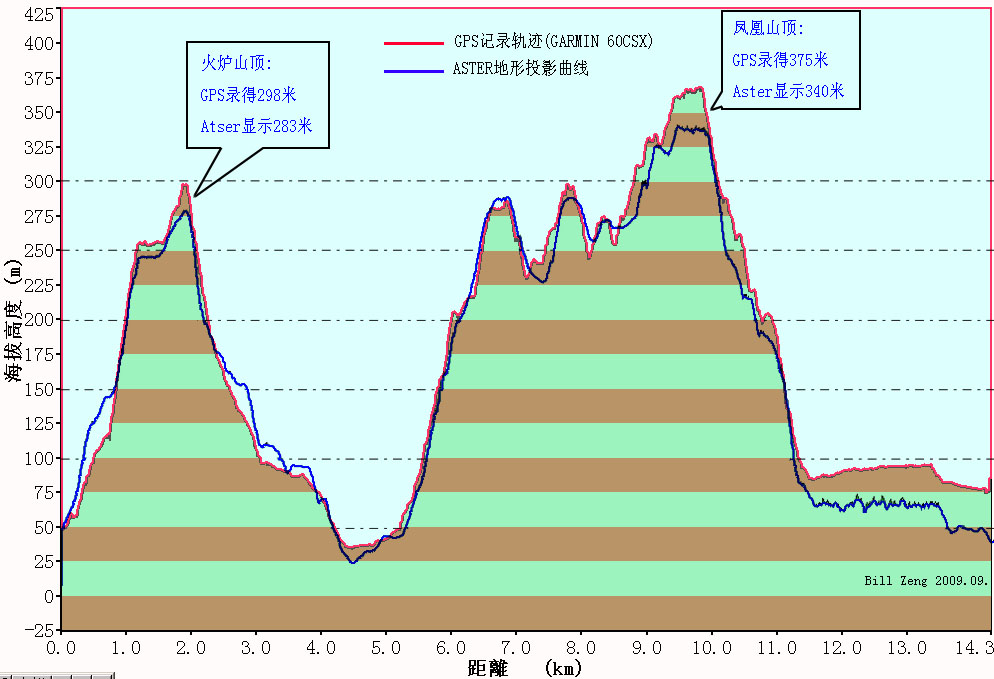
这是9月13日和跟风一起爬火帽线的GPS轨迹与ASTER地形的比较图, ASTER山峰形态与GPS轨迹大致吻合,但细节上有不少差异,尤其ASTER的峰顶被削掉不少高度.
billzeng
·
2009-11-02 05:28
最近跟风大哥给了我两台GPS作对比测试,一台是正版60CSX,一台是水OREGON 400T, 加上我自己的水60CSX,现在手里有三台GPS,呵呵!很富有啊
来个合拍:

水和正版60CSX看起来没太大区别, 正版60CSX的按钮是简体中文字,侧面贴了个什么许可证之类的标签! 可两者的价格区别就太大了, 正版的要RMB8K多,水的嘛,2~3K. 简直是天上人间.... OREGON看起来就很斯文的,方方正正,屏幕比60CSX要大些.
billzeng
·
2009-11-02 05:39
把三个家伙放在车上,看看精度吧!

两个60CSX显示的信号精度是4米,400T是6米.
当然正版的60CSX使用的是加偏的地图,显示的经纬坐标也是偏的.
三个GPS都没开背光,显然60CSX看起来要清楚些, 400T看起来不够清晰,可能因为400T是触摸屏的缘故吧.如果将400T的背光开到4格以上就很清晰了,当然耗电量就大些 ,我认为这是400T的缺点之一.
,我认为这是400T的缺点之一.
昨晚拟了一个作业草稿,有点长,现在粘贴了上去先,好好顶顶这个帖子。有空可能还需要校订一些文字疏漏。
以下是作业提纲:
1、 偏爱的功能;
2、 搜星能力;
3、 漂移问题;
4、 轨迹记录;
5、 经纬度定位;
6、 高度测量;
7、 里程计算;
8、 地图资源;
9、 小结
【补注】帖子后来又增加了内容,补贴提纲:
1'、轨迹的欺骗性;
2'、高度的虚假性;
3'、经纬的准确性;
4'、里程的复杂性;
5'、天线的重要性;
6'、软件的合理性。
大热天,走山少些,趁机整了2个GPS。有些体会,也有不少糊涂的地方,整理成作业备忘吧,贴上交流,请玩家多多指正,以便提高。
在我选择GPS的过程中,咨询过不少的驴友,得到了他们很多的热心建议和帮助,在此难以一一署名,谨致谢意!我对GPS并无依赖,过去也没有琢磨过。科技在进步,使用者也越来越多,其好处已经被证明有N-1个,不足之处可能也有吧,还是看怎么去合理利用了。所以需要交流和分享一些体验。
热天呆在家里学习了一把GPS,指望天凉带了出远门,能够派上一次两次的用场,也就算有回报了。当然,最好永远不要派上用场。但还是应该不排斥地带上,就像出远门总要带上感冒拉肚子以及外伤之类的常用药品一样,虽不希望会用上,也可壮壮胆,有备无患啊!
对于喜好的玩家,GPS是一个很有趣的“玩具”;
对于多数的山友,手持GPS又是一个很实用的辅助“工具”;
对于较真地想用来测量的驴友,GPS可能是一个并不足够精确的“量具”。
有人说美国佬故意在GPS卫星信息中加了些随机数,使得民用测量的精度降低,这些国家大事咱说不清楚,这里还是只讨论GPS吧:
先晒晒我的GPS:
在广州著名的“火龙线”的华南第一坡上照的,因出门没有带相机,用手机作个留念,很不清晰,只能凑合着看了。
依次为:我的 Garmin Oregon 400t、派特风 PET L25,另外2个PET L25是同路的TX的。
【特别声明】 以上照片4个GPS直接摆在地面接收可能带来测量精度误差,请切勿模仿。模仿带来不良后果概不负责。呵呵!
那么什么样的摆放姿态接收是正确的呢?谁能回答下?要不后面再议吧。一个无线电的东东,测试误差的来源太多,就像电视机在家中,没人能回答天线的正确摆位,不同的频道/不同的时间,都需要将天线瞎拨弄一番。
我倒是有个馊主意:取一根R=100m(也许最好是1000m)的结实、柔软、无重量的细线,栓上一小型“氢”气球,挂着GPS升起来,在一地面、空中上下同步记录的时刻t0,设法量出细线与铅锤轴的夹角Theta、与正东偏北的夹角Phi。然后,放下GPS,读出t0时刻所记录的空中位置的海拔高度H、经纬度E、N,并按照R*cos(theta)修正高度H,按照R*sin(theta)*cos(phi)、R*sin(theta)*sin(phi)的偏移路程修正经纬度E、N。
也许这一测量方法是可以申请专利的,既然现在不小心公开了,也只好作罢!
【特别声明】 以上方法,切勿模仿,万一“氢”气球自我膨胀爆炸,导致GPS自由坠杀,本人概不负责。呵呵!
多数驴友都推荐我选用Garmin Map60CSX,因为用的人多,口碑好,资源共享方便。同时与时俱进的驴友也推荐我选用2009年新近推出的Garmin Oregon 400t,最终听从了后者的建议。产品介绍和用户手册链接:
http://www.garmin.com.tw/products/Oregon400t_TWN/index.html
用后感觉还不错,具备全防水功能,适合野外作业。
派特风 PET L25也有些来头,我通过磨房高寒地带的一位大佬匀到一台。参考以下磨房介绍和用户手册下载:
http://www.doyouhike.net/forum/comm_nav//329050,0,0,1.html
http://www.2bulu.com/default/petlair
派特风 PET L25功能多多,上上周末走广州“火凤线”后,同一桌FB的一个驴子,也在用PET L25,说是曾用来和几千公里外的朋友作对讲玩,这事我还不明白是咋整的,功能是太多了。
另外,听说磨房山野的大佬们(等效丐帮9袋弟子以上级别)大都整了一个PET L25,使用GPS的同时,是可以互动聊天的(我还不会。目前为止我连QQ聊天都没有学过,我发誓。),想到一不小心就可能被磨房某个大佬“加为好友”,倒也是意外收获啊!
好了,进入正题:
1、 偏爱的功能
提一提我喜欢的几个功能,先说PET L25:
以下这个好,喜欢!
在显示搜星状态时,不但显示经纬度和海拔高度信息,同时还能显示大地坐标系WGS84,这样可以和磨房中强驴们作的等高线地图中的距离标注结合起来:
以下这个也好,喜欢!
在路途中,往往匆匆地按默认的时间取名方式存下轨迹文件,PET L25可以事后修改文件名(但Garmin则不可以事后修改文件名,这编程的人真是死脑筋,我想了变通的蠢办法才改动了文件名)。更有意义的是PET L25的轨迹文件的详细信息可以随时调出来显示,如下:
可以看到,在广州火炉山急升坡“1上1下”和“8上8下”的信息都一清二楚了,这样容易备查。
Garmin GPS上好像不具备这样的功能。
再说Garmin Oregon400t,最喜欢的功能:
GPS有屏幕拷贝功能,如同电脑的 “PrtScr”键,它会瞬间“快照”屏幕并自动取名存盘。以下是在广州“火凤火”线上的几个快照:
图中,上排3个屏幕拷贝是走到了离开火炉山起点5.7km处(猪仔山上,经纬度:N2312’17.2”, E11324’17.9”)的实时快照;下排前2个图是到达凤凰顶的信息,最后一个图是回到火炉山下一个农庄FB时刻的信息。全程走了6小时还多,相当的FB。
另一偏爱是:航迹记录模式有三种,我最喜欢选时间方式,最密为1秒记录1个轨迹点,不同的选择方式可以得到不同的轨迹模样和里程估算结果,需要慎重对待,后文有讨论(充分利用这些特征,甚至可以走出任意花样但不是自己真正走的轨迹,呵呵!这是题外话):
这一功能的灵活度就像单反相机自由选择光圈和快门。而PET L25仅有的黑箱子式的自动记录轨迹的功能,有点一笔糊涂账,好像在用傻瓜相机,逊色不少。
还喜欢的功能有,JPG照片的储存和浏览,如下:
Oregon400t内置了4GB卡,另外还有一空槽可再添加一块SD卡。可以将一些自己喜欢的JPG文件连USB传上去。
以上图,中间图是实际走山时的轨迹和地图。轨迹可以预先拷进去,跟着走。这个内置地图虽有50m的等高线,效果还是差点。在电脑上如果做个10m的等高线,比如上面靠左边的图,这还是可以做到的,勉强能学得会。但如进一步想将电脑上的地图转成特定格式并融入手持GPS的地图,这可能需要学的东西就太多了,不是每个人都愿意学,至少我就学不会。
目前我的做法是,直接将电脑上的JPG文件拷入GPS,平时看中间图,一路上有疑问时,将JPG文件显示出来看看,如上面的左边图,放大缩小看看。相信这样可以为不少懒人节约数十或数百小时的学习时间,也基本达到了近似的使用效果,可以多出一些时间去爬山,是合算的。
另外,如上面右图:一些其它信息,如老掉牙的纸质地图等,可拍成JPG照片,拷上去,路上可以随时放大浏览:高程、水源、路径,一目了然啊!
2、搜星能力
PET L25的搜星能力特强,比Garmin强。前者在房间里有时也能持续收到信号,后者就不行了。
信号强是减少漂移和提高测试精度的一个重要条件,后文另有讨论。
在飞机任意位置上,PET L25可以保持接收,中途上厕所也不掉线。Garnin不行,起飞前,挪到靠窗,总算抓住了信号,升空不久,掉线了,再也搜不到了。
由于PET L25同时可以打电话,所以我在飞机上取下了Sim卡,仅作为GPS接收机使用。
以下是PET L25记录的“广州-北京-广州”轨迹。PET L25有个缺点:开机后要设置GPS开,然后还要设置记录轨迹开始,否则不自动接收和记录,下图右边回程,起飞后到了保定上空,才发现未有记录,重新设置居然还能抓住信号,够强悍!
正好明天又要去北京,想再测试一次试试。
以下附上实际的轨迹,还是有一些好玩的信息在内:
附件:
广州--北京.rar
广州起飞时,只在花都附近绕一小圈:
起飞细节,从77#位置点 开始助跑,由北往南起飞:
广州降落时,绕了个大圈,绕到了佛山南海的里水镇,多飞
了上百公里:
我大概算了算,北京和广州之间飞来飞去不止100次了,但一直不明白为什么北京回广州的时间长些,正常要3小时左右。以前问别人,都说可能与地球的自转有关,可这是在南北飞啊!看来还是与具体的轨迹有关。
北京降落,和想象中的抄近路也不一样,绕到了八达岭:
多年前,我曾在空中拍到长城,现在明白了:
呵呵,这个照片有点Google地图的味道。
3、漂移问题
只要是在地球上,都有得漂。漂多漂少的问题、“50步”笑
“100步”的问题。像室内、街道、树林、峡谷中,漂移大
于100步(约合80~90m)是不稀奇的。至于在光突突的山野
顶尖,远远小于50步的漂移是可以期望到的。甚至小于5步
的漂移也是能达到的,看当时星星强弱的运气了。
下图,静止放在办公室的大玻璃窗边,窗外朝东是小河,
180度视野开阔无遮挡,GPS接收信号强、稳定。但Garmin机
静止了2个小时下来,轨迹曾往东南方向漂到了小河的东岸
,漂移有300m之多,应该是不稀奇的,没有什么实际意义:
上图右图,假定街道地图的经纬度是正确的(实际轨迹有时
在/有时不在预期线上,这说明街道地图本身的绝对经纬度
基本是正确的)。可以看出,与预期的红色线路比较,轨迹
的部分漂移最多20几米,没有什么精度讨论意义,实用还是
不错的。
这些漂移都不会带来什么大的危害。
一旦到了开阔的山顶,Garmin GPS机的经纬度在0.1”的角
分辨上很稳定,就像钉子钉住一样,下面会说到。
还是有些特殊情况,如下图:
其中当时Garmin机的数值是:E113*22’40.7”、 N23*14’
14.6”很稳定;一左一右的PET机也是如此,只是分辨率为1
”而Garmin为0.1”。但上图中间的PET机漂移有些不对头,
经纬度都漂了约有1’多,合计有2.7km的漂移。不比不知道
,看来这位TX的GPS运气不太好,建议拿到美国NASA宇航局
标校一下,呵呵!
【补注】 上面写过的发现有些误导,也不更改了,事后注解一下:
以上说的其中一个PET机大漂移,换个地点后,发现又好了。其实,在地球上绝大多数地方,免不了
漂移,这次看到你飘,下次看到我飘,几家欢喜几家愁,其实都是误导的,不能瞎比,因为比的
条件是不科学的。 所以特别解释一下。
所以,就像在不同的哈哈镜前选美,丑女也有当选的机率,这次你高兴,下次她高兴,不公正。
总想把测试条件搞成一样,严格来说是不可能的,尽量吧。
所以,如想比对好坏,要慎重!如果精度接近,你可以下相当的结论;如果差别很大,你却不能随
便下结论,这需要更多的其它验证。越扯越远,就不多说了。
4、轨迹记录
PET的轨迹形状记录有一定条件要求,如下,在跑道上记录1
小时整,可以看到形状很像,漂移也很小,在Google中看到
,绝对经纬度偏差带来的定位差在10m之内(大多可能只有
3~5m),图右边细节显示整整走了17圈计6.8km:
继续,走赛场中央的足球小圆(18.3m直径)重复转圈,PET
是不作轨迹记录的,那怕你走上几个小时。试探表明,直径
小于20m的圆轨迹不会记录。
没办法,将圆圈放大到约35m直径,转圈走,轨迹显示出来
了,如下图。走出的是一些3、4、5边形。很容易理解,PET
的软件设计师的判定条件是走上约22m才踩出一个轨迹点(
当前设置情况且伴随步行状态时,还有另2种情况可设置)
,这个自动的傻瓜程序编的不够好,且不允许客户改动,郁
闷。
看看GARMIN 的轨迹吧:
不但18.3m的圆能走出来,守门员区域走锯齿线也成功了,
连篮球场中央的2、3m大的丁点小圆也走了个大概示意(虽
然~5~m左右的漂移已经大于小圆的直径)。
上图3处细节放大:
这是采用1秒钟设置记录一个轨迹点的结果。
参照“眼熟能详”的足球场地比例尺寸,这3处细节的实际
长度一闭眼就能想出来,目测即大概能看出:运动的轨迹的
地图绝对偏移在10m之内,瞬间的相对漂移在3~5m。如果静
止下来呢,地图绝对偏移应该继续是在10m之内或更小些,
也许典型在5m左右。而瞬间的相对漂移是在3m之内,因为
0.1”大约就是3m,静止时基本未见经纬度动过。除非正好
踩在2个相邻的0.1”中点上,这时也只要挪一小步就定住了
。
5、经纬度定位
如上,就Garmin机来说,在空旷之处,尤其是突兀无树林的
山巅,经纬度的漂移在0.1”之内,绝对的经纬度定位误差
普遍可以达到10m之内。至于重复度,参考上述跑道重复走
的轨迹,在运动中都可以达到10m之内;在静止中会更小,
应该算是相当的满意了。
PET的经纬度显示分辨率为1”(30m),相信是远远达到了,
至于是否能达到Garmin的3m,因为分辨率不够而无法判断。
其它地方,如室内、街道、树林、峡谷,50步100步的误差
随便都有,不讨论也罢。
以下讨论测海拔高度时,还可顺便看到经纬度的稳定性是相
当的好。
6、高度测量
【补注】 原文疏漏,也不改了,事后解释一下:
下文中有多处描述的“估计误差”,应该是用来估计经纬
度的误差,但我却用来估计海拔高度的误差。属于误导,特此致歉!
但是,经纬度误差越小,海拔高度的误差也应该越小,二者应该是正比相关的,因为他们
的测试都来自同样的星星数据。所以,还是可以适当参考,没大错。
又:这一“估计误差”的概念是否是我文中提到的正态分布和 3 Sigma 原则,还有待商榷,
在GPS机器的说明书中并无交代,这又是我在“无端发挥”,请有所鉴别,谢谢!
下面是我曾用GPS在山野高度测量的一个实际例子介绍的链接:
--------------------------------------
» 论坛 » 山野 » 精华和推荐 » 贯通罗霄山脉的7天连续穿越----实战攻略
http://www.doyouhike.net/forum/389742,85324914,1,0.html
[注] 在其中的第 6 页面的第 Post #130 楼。
--------------------------------------
精确测量高度,比经纬度要难很多!
我的测试摆位是举高过头顶,离地~2~m,这时GPS信号最强
,估计精度能提高点。
我只测无树荫遮挡的山尖,其余地点不作准确测量,因为物
理上的测不准原理使得测试过程和结果无太大实际意义。
原理上看,3颗星可定经纬度,4颗星可定高度。实际上这只
是必要条件,星多多益善,强度越大越好。满足这样条件的
地方只有无树荫遮挡的山尖,且静止,并稳定5~10分钟观察
。
首先,为方便和摸底起见,我在家门口选了一块广场高地,
四周可以说无明显遮挡,但不能说无影响。
然后,每天吃饱了饭就散步到那个经纬度“记号”点位去测
测高度(也测经纬度)。发现,每次/每天的星星数量/编号
/位置都不尽相同,呆个半小时后也变得不同,真是“斗转
星移”啊,我也不想去琢磨这些斗转星移的随机规律了,因
为它不是天文现象。想来可怕,没准美国总统梦游按错了按
钮,咱在山野中就要捆上几天,等信号再来了,GPS可能也
没电了。
且说我只求星星多、信号强。确实满足这一条件时,越满足
精度就越高。
如下图:
上排中图,在点位附近徘徊了一阵子,轨迹成了马蜂窝。另
选5次测量结果实时拷贝屏幕图附上。可见,经纬度就像钉
子一样不动,虽然每次的星星个数/编号/位置都不尽相同。
高度则有不同变化。其中:左上,某次有8颗星的信号很强
,显示的估计误差为3m,高度为45m,这一值是相对可信的
,误差应该典型在6m之内(2 Sigma),当然也不排除有9m
的误差,根据3 Sigma的正态分布原则,小于3 *3m=9m的概
率是99.7%。
再看右上图,虽然估计误差只有4m,但实际误差可能达到3 !)。
!)。
*4m=12m或更多,因为只有4颗星信号较强。这时居然北纬还
漂了0.1”,也是高程数据不准的一个依据(但愿千里迢迢
爬到某座山峰,不要碰到这样的星星状态,最好事先通知美国
NASA宇航局将信号发强点。呵呵!什么叫靠天吃饭
再看以上的下排3图,都至少有6颗星的信号较强,推测误差
最坏不会大于9m,至于个别结果碰巧与真值靠近,也是概率
原理之内。
根据这些大量的测试,最终将该点位的高程标定为45m。
再看看气压式测高,如下图:
每次测都不同,说明书上说要不断地经常自己校准,无所适
从。目前还未整明白,只作参考。
不明白的是,Garmin的轨迹记录文件中的高度是选用气压式
测高数据,而非我们这里大量讨论的GPS测高数据。我这样
理解:在山野运动中、遮挡中,GPS的误差很大,气压式高
度计反而不受这些影响,所以采用它来记录时,在1小时小
时内的轨迹各点的相对高度可能是基本一致的,但可能与实
际海拔有较大差异,下面有这样的数据。
由于气压式高度计容易受压强变化而带来误差,所以需要经
常校准,但我们当时总是没有校准所需要的真值,所以不好
采用。其实,一旦到了山顶,并且静止和稳定下来后,GPS
就准确了,所以关键场合我还是用GPS测高。
接下来一个实际测高的例子,三次晚上上白云山顶(摩星岭
)测试:
白云山顶有官方海拔标注(上面不知何年何月刻文382m):
左上图:第一次上去,GPS开始显示在382m附近,很高兴,
一上来就对上号了,呵呵!但随后很快漂到370m,后又回到378m稳
定(举过头顶的测量姿势),GPS再不肯动了,定住了。当时有
点扫兴,只好记录378m的状态作为第一次的测试结果(实际应该再减
去2m的举高吧)。
接着,看中上图:将气压式高度计校准设置为382m(官方数
据啊!)。
右上图:第二天晚上再来,气压式高度计变成了429m,这时
候我纳闷,也懒得校准了,想维持看看第3次再来会怎样?
左下,是山顶10多米范围内晃悠的轨迹。
下排最后2个图,比较稳定的结果是372~374m。第2次就这样
很郁闷地下山了。当时认为有这么好的信号强度,误差也居然
大到10m以上{382m -【372m - 2m】}。
突然想起印象中的一事,回到家里一查,发现白云山的高程
数据在去年已被刷新为372.6m,足足下降了将近10m(真不
知这么多年官方在开什么玩笑?),参见下贴post #58楼:
http://www.doyouhike.net/forum/349556,84653417,1,0.html
于是又来了精神,第3次再上白云山:
先看气压式高度计:
左上,还没有校准之前:从上次的429m跑到了399m;
在山顶晃悠了30分钟,漫游了约200m后,临下山前将气压式
高度计校准为官方372m,如右上图;
期间,再仔细GPS测高,如左下图,哈!有史以来运气超好的一次,
居然有11颗强星,其估计误差的显示为3m,实测的高度为372m。
右下图为轨迹 ([注] 图中标的经纬度是针尖处值,不在当前顶峰位
置,离顶峰还有102m的距离 )。
总结:“强星”个数第一重要。山尖高度能测准。运气好的话,3~5m
的准确度可以达到。
第1、2、3次分别有7、9、11棵强星,所以,一次比一次准确。这是
运气问题。3m、4m、5m的估计误差仅作为参考。3m最好,但如果
3m误差显示时仅配套有5颗强星,其实际的误差依然有可能达到10m
甚至以上。
目前为止,我从来没有碰到过“估计误差 2m”的显示,看看那天美国佬
给星星再加点能量,让我好好见识一下高科技。
至于到了山野,如果就一次,且只能停留一次5分钟或10分钟,能否测 !
!
量准确的高度,那就全凭当时的星星条件和运气了。需要事先和美国佬
预约,呵呵
7、里程计算
里程计算是GPS的一大软肋,计算不准。说来话长,以下给
个具体例子吧:
广州火炉山上的“急升坡”,大大有名。
GOOGLE地图上的急升坡经纬度:
在GOOGLE中度量起点和终点的水平面直线距离,约为270m。
急升坡等高线图:
起点和终点大约从170m升到270m,节节高,无任何下坡。
度量图中起点和终点的水平面直线距离,约为280m。
如果用起点和终点的经纬度计算水平面直线距离,也约为
270m。
我先用PET L25走了个8上8下(空手,揣了2个GPS,抓瓶水
,以相当快的速度,2小时16分的总行程基本未做停留,等
效连续翻越了8座周期性的小山,尽量减小人为引起的漂移
):
轨迹:含1上1下、8上8下、以及8上8下的局部放大共3个图
:
下图是部分文件信息:
从轨迹文件的详细信息中已经看到了,计算结果(单程)平
均约为260m,比水平面的直线距离还短,有点搞笑。
这是实际的所有KML轨迹附件,请参考和研究:
附件:
派特风GPS_走_急升坡轨迹.rar
用Garmin也走了若干次,同样测不准:
这是GARMIN急升坡里程的一次典型记录:
这4个实时的瞬间快照无法做假:
首先,在坡下起点将所有显示信息清零复位,爬到坡上后的
记录为左上图,显示走了245m,耗时9分50秒(稳步不停,
这次没打算走快,认为走稳、走稍慢更容易记录准确);
接着下到坡底仅记录走了401-245=156m(原因是上坡我采用
自动记录间隔的“正常”模式;而下坡时我采用自动记录间
隔的“较慢”模式,不同设置有影响,但都是测不准的)。
其实,从图中下排的左下、右下图二图已清晰地目测出水平
距离都已经达到了约280m,为什么计算的总里程只有156m呢
?自相矛盾的数据显示太混乱了,搞笑。
更搞笑的是,同时携带的Nokia N79在8上8下测得的里程为
平均350m。以下只是事后照片示意,不是当时的情景。N79
不能保存轨迹,过去的事,当时没有带相机留影。
即使是350m的测试距离也与我心中的数据有出入,还是偏小
。为此,我又以1秒时间间隔设定再走了急升坡(Garmin显
示的里程还是在大约250m附近徘徊),并将数据导出,干脆
自己整个小程序来计算。所有相关文件在以下附件中,有兴
趣可参考:
附件:里程简单计算.rar
附件中有2种计算工具:“里程简单计算1.exe” 和 “4_急
升坡里程--试计算.xls”。 计算所选择的简单方法是同样
的,这在XLS中稍微看看就明白了。
初始输入数据文件如此产生:
(1)、在Google地图中装入“*.GPX”轨迹,另存为
“*.KML”文件,;
(2)、选用记事本打开“*.KML”,如下样子:
<?xml version="1.0" encoding="UTF-8"?>
<kml xmlns*****************<coordinates>
113.380778,23.182531,100.6
113.380778,23.182531,100.11
113.38078,23.182522,100.11
113.380784,23.182512,100.11
113.380789,23.182506,100.6
113.380794,23.182503,100.6
113.380798,23.182499,101.08
113.380802,23.182497,101.08
113.380807,23.182496,101.56
113.380807,23.182496,101.56
113.380811,23.182492,102.04 113.380815,23.182489,103
113.38082,23.182485,102.04 113.380825,23.182482,103
113.380829,23.182478,101.56
***********************113.383334,23.182201,239.51
113.383338,23.182199,240.47
113.383342,23.182195,239.99
113.383346,23.182193,239.99
113.383348,23.18219,239.99
113.383344,23.182187,240.47
113.383351,23.182187,240.47 </coordinates>
</LineString>
</Placemark>
</Folder>
</Folder>
</Document>
</kml>
其中的2处*****部分分别为省略了很多的文字和数据。
将前后2个<coordinates>之间的数据完整拷贝下来,存成一
个纯文本数据文件(其中总共会有N个轨迹点,即3N个数据
:经度、纬度、高度);
(3)用 “里程简单计算1.exe” 运行一遍,调用以上的纯
文本数据文件输入,即得到里程计算结果,同时还会得到一
新的整形编排过的数据文件(还是3N个数据:N行、每行3个
数据),如下示意:
113.380778 23.182531 100.11
113.380780 23.182522 100.11
113.380784 23.182512 100.11
113.380789 23.182506 100.6
***
***
***
***
113.383338 23.182199 240.47
113.383342 23.182195 239.99
113.383346 23.182193 239.99
113.383348 23.182190 239.99
113.383344 23.182187 240.47
113.383351 23.182187 240.47
把这个数据文件导入到XLS文件,其中的算法我已编好,同
样也得到了里程计算结果。
这样下来,计算的结果为460m。
我认为,我的这一简单计算方法所得到的结果同样是欠科学
的,因为它没有将轨迹中的漂移和抖动去除(1秒一个轨迹
点的数据抖动不少)。在这个特例中,因为一直上坡(下坡
),所以我们是有办法人工去除抖动,但复杂的实际地形是
难以用软件来判断和自动去抖的。
暂时离开GPS吧,我心中自有里程的评估准则。
7、里程计算
里程计算是GPS的一大软肋,计算不准。
[/quote]
Garmin记录的里程都是平面投影距离吧
8、地图资源
PET L25的内置地图无等高线信息。
Oregon400t内置了中国地图1300MB,等高线为50m分辨率,
差值后的等高线尖锐,不圆滑,误差大,不够理想。上文说
道,自制高分辨率的等高线并转化成GPS识别的地图并导入
GPS,可能需要学习太多的知识,我自己就不想学,目前想
学也一下子学不会。
最近,Mr. Billzeng 给我启蒙,教我应用GlobalMapper9做
基本的等高线图,特此谢谢下!然而我只会存成JPG文件到
电脑上,于是直接USB拷贝JPG到GPS手持机内部浏览就完事
了,结合Garmin内置的地图,使用效果差不多,省事,呵呵
!
多数时候,Garmin Oregon400t的高程数据地图还是凑合着
能看看的,如下。
分别是江西南风面、江西武功山、广东船底顶的局部,还可
以任意放大/缩小:
Garmin Oregon400t 的屏幕拷贝功能甚至可以将地图拼接输
出,也可将就一时之需。
如下是船底顶的局部:
虽然科技发展一日千里,但我们总是不太满意。人的追求是永无止境的。
让我们来忆苦思甜一下,回顾我们这20年来数字地图的发展
:
如上图,今天,配置在航天飞机上的先进的合成孔径雷达(
SAR--Synthetic Aperture Radar),经过十几天的空中扫
描飞行,就可以大致完成整个地球表面的地形测绘,真是太了不起了。
http://www.sandia.gov/RADAR/whatis.html
与此鲜明对照的说,看一个上个世纪的老掉牙的真实历史故事:
先欣赏一下我国的第一幅“合成孔径雷达成像”(SARI,
Synthetic Aperture Radar Imaging)的照片:
放大看:
好像有点失望?那可是里程碑的事件啊!
上图来自于我原来工作过的单位于1999年10月搞的一个50年
“所庆” 时的宣传册,如今,10年过去了,应该老掉牙了
吧?
今年10月,原来单位应该与共和国一起搞60年 “所庆” 了
,相信肯定会有更惊人的成果涌现,不过我上世纪已离开了
这一环境,早已堕落到了对本世纪的各项进展都一无所知的
地步。
其实这张照片在当时的情况下还算是一个瞩目的成就。偌大
一本精装宣传册,代表了本领域国家的水平,多是展示人物的回忆和硬件的成果照片,软的东西也就是当时几位关心装备的军委副主席的热情题词和这张唯一的成像照片。
说来难以置信,1994年5月,我的同事在实际SAR飞行采集到这第一批宝贵数据后,找遍全所上下,无人能够在WINDOWS下处理出一幅彩图,最后作为要好朋友由我这个非计算机专业的局外人凭业余兴趣瞎整出了这幅图。
当时大家很兴奋,有些得意,很快请来了总工和宣传处的摄影师当场在我的电脑CRT上拍了下来。可以看出,当时CRT的球面弧度很大,且画面的左上角图像也没有恰当地移入视野中。后来选为1999年所庆的宣传品,说明这张照片还是代表了20世纪末中国的最高水平了。
随后不久,我一生中这位最好的同事意外遇难,相信目前这
些原始数据在别处已经不复存在了。最多在宣传处立此存照。
最近琢磨GPS,才想起来把我1998年12月离职时刻录的一张CD-R上的2幅15年前的原始BMP文件贴出来,其中打上了 “磨房” 字样,特此怀念我永远失去的世界上最好的一位朋友/同学/同事和上司,也是该领域当时最伟大的一位人物。
这张BMP文件比以上的照片信息还全点,至少左上角没有残
缺。
下面这张的信息量更大,我从来没有公开过。上述公开的只
是截取了其中的一段数据。
今天,打开Google地图, Mr. Billzeng 替我找到了SAR照片的出处,在安徽铜陵和芜湖之间的长江黑沙洲:
可以看出,短短15年,沧海桑田,中间的 “磨房” 2字区
域附近积累了大量的泥沙,河道变窄不少,有向黄河趋近的去向。能不能大胆预测以下,1亿年后,这里将是一个大戈壁滩?呵呵!亿万年的地球,短短这些年加速地在改变和破坏!
相比从前快乐地过来,现在的资源太多,只是觉得不够用、不够以前快乐。
9、小结
GPS功能丰富,实用,是很好的辅助工具。
一般人PET就够用了,很好,很实惠;
走恶劣环境者,如探险或高寒地带、玩家、挑剔者,可以选择 Oregon 400t,还算满意吧,只是价格贵些。
GPS最好不要过份依赖,原始的一些户外求生手段和技能应
该保持和提倡。
GPS在静态下有可能测准山峰的高度并定位其经纬度,但难
以估算出山野的里程。山野地形是多样化的,估算出来的情
况也难以作出推广。我还是采用自己的原始的土办法更有效。就前面关于 “急升坡” 的里程,自己不需要GPS也早已心中给出了评估的数据。
谢谢“跟风”做出如此详细的测试比较,相信看过的人都会对GPS有更加深入的了解!明白GPS是个强有力的辅助手段,但不是绝对,并对设备的选用也会有个清晰的思路!
好文:加10分以示表扬!
谢谢“跟风”做出如此详细的测试比较,相信看过的人都会对GPS有更加深入的了解!明白GPS是个强有力的辅助手段,但不是绝对,并对设备的选用也会有个清晰的思路!
好文:加10分以示表扬!
[/quote]
驴友告诉,进来一看,好高兴。
谢谢!谢谢喜版主,太荣幸了!
一会儿要出差去北京,回来后慢慢聊!
很好的帖子
目前oregon用的人很少,大多数兄弟都不敢尝试
兄弟你的贴非常及时!能支持定标的jpg文件,很多自制地图,老纸地图,卫星图,甚至校正后的航拍图片都可以派上用场了,比目前的60csx多了很多玩法,值得大家注意
你提出的里程不准确的问题我也不明白,一般我是导出到mapsource以后手工去除明显的漂移点看里程的,也没有深入挖掘
谢谢工兵的鼓励。
很惭愧,我买了Oregon400t已经1个月,连mapsource都没有用过,目前尚不知道这个软件的用途。唉,要学的东东太多,懂的东东太少,忙不过来。
我在上面9楼的附件: 里程简单计算.rar 中,附有 “里程简单计算1.exe” 和 “4_急升坡里程--试计算.xls” 二个极其简单的计算程序,谁都可以简单试用。前提是自己用任何其它方法得到一个 " ****.KML " 轨迹文件,其它的我都介绍了。
对于同一段轨迹,如 “急升坡”, 因为我走了N多次, 用了不同的 “航迹记录模式”, 得到的多数里程结果是250m~300m, 上面也提到得到了460m的结果。 我想,大家多试用不同的轨迹验证,包括平路(这时结果肯定正确啦),以后对里程评估将会逐渐有一深入认识。
我以后也会继续考察。
据说Oregon 400t搜星能力还不及60CSX?
呵呵!60CSX的实物我仅在见到 Mr.Billzeng时,放在手上掂量了1~2分钟,感觉有男子汉的气概。至于Oregon 400t,感觉是个白面书生,很文弱,不过防水能力是依旧的。
60CSX的天线突出于外,其电磁波的接收效果一定 >= 内置的天线形式(400t),否则,产品可能都愿意做成后者。前者一定是性能和外观斗争的结果,后者也是。我虽然未用过前者,但愿意相信前者信号更强。因为我是设计天线的,也许有一种职业上的偏见。
不过,从我以上8楼关于白云山的3次详细测试结果来看,我已经满意得不得了,所以也就不计较Oregon 400t的 “弱信号” 了,尽管她的强度确实抵不上PET L25。
我猜想Oregon 400t的设计在后,软件和算法一定有所占优,所以测试中能够表现稳定。
看到了传说中的俄勒冈,界面蛮漂亮的。
至于漂移等等,毕竟是民用级别,美国佬给我们免费使用已经非常厚道了。
楼主辛苦了")
同意你关于漂移的看法。尤其是目前我们能得到30m分辨的DEM数据,已经很满足了。
第一次接触俄勒冈,还是来自您的帖子中的Garmin的60CSX、Colorado、Oregon三剑客的介绍。 知道您对60csx宠爱有加,但也得与时俱进啊!呵呵 !
!
导入/处理轨迹不一定要用mapsource,用它主要是因为免费够用,自己写程序分析灵活性更好点
GPS的某个点位精度主要应该受接收机灵敏度,星座拓扑,后处理滤波器设计的限制
派特风的灵敏度高有可能是因为他用的是那种有源定向天线,而garmin可能用的是全向无源天线,两者的gps芯片也有区别,oregon好像用了MTK的
里程统计我粗想了下,灵敏度,漂移,采样间距和线段拟合算法,是否包括高度信息都有影响,再看看
关于天线,在手持GPS的有限尺寸范围内,想做全向,其实难以达到严格的全向,近似全向吧;想做定向,也难以做到高定向,最多是弱定向吧。呵呵,毕竟尺寸就那么点大。至于有源/无源的界定,就不一定显得重要了,反正下来总要接个LNA。想要灵敏度高点,LNA的增益搞大点就行吧,应该不难做到。
不知是否应该考虑:
用定向天线不一定符合GPS的应用场景,因为整个上半空域都有可能有星星,而且斗转星移,不停地在变化,这样还是近似的全向天线更好。当然,天线的垂直面方向图在由高仰角逐渐接近水平角度时最好能略有收缩,以便适当抑制来自远处地平线的大量多径反射干扰,从而提高测试精度;
灵敏度高也许不一定是好事,高强度的星星应该以不饱和接收为原则。前文中,白云山的第3次测高,11颗星星中已经有4颗的强度饱和了(Garmin的图示而已,鬼知道是真是假,原理上假定是吧)。如此,似乎不应该再盲目提高灵敏度了,也即需要合理选择LNA。所以,我倒认为Oregon也许更适合在山顶测出准确高度,当然,也许在溪谷中,信号就低了,难以2全啊!
也许,多给点钞票,让其将动态范围搞大点,比如A/D变化的位数增加几位,高频三极管的合理选用等等。不过,民用产品一旦大规模商业化,差异化的使用也就难了。
两种天线增益差3个还是6个db,定向陶瓷天线的角度是和GPS星座匹配的
实际上GPS卫星发射器设计了多个天线(12个?),就是为了场强均匀,饱和是不太可能的
GPS ADC似乎就是1bit,多了也没啥用,现在也都是单独的IC,不是三极管搭的
主要的差异化还是在基带,前段抛去天线没多少花样的
呵呵!跟在工兵后面能学到很多知识,曾经学习您的 “等高线地图&DEM闲谈v2.1” 帖子就长了不少见识。
http://www.doyouhike.net/forum/comm_nav/343242,0,0,1.html
您有些说法我不太明白,因为知识面不够,就跟在后面学吧! !
!
但有些说法我明白,同时也有自己的不同看法,后面我还是要说一说。
我得先想一想,看看怎么说比较合适,就我们现在2个人这样拉拉锯,可能进来共鸣的驴友就少了,呵呵
看来各位都是高,精,专淫才啊。
本人纯使用派,不会写程序,不会分析。
强迫自己搞懂等高线图制作和导入已经不容易了。够用够用。
最新的60csx也采用了MTK方案,所以目前刷新成简体中文,会出现搜不到星的问题,暂时没法解决。
刚开始接触GPS,感觉接收信号灵敏度和漂移是个不可调和的矛盾,大品牌一般都做的比较保守。
楼主很强很专业,想必一定是科研人员,1998就开始用CD-R了,印象中96年我才开始接触电脑,2000年才知道CD也可以R,随后才有了自己的刻录机,料想98年楼主的刻录机和CD-R都是天价~
可否继续聊聊对灵敏度和漂移的看法,正想学习。谢谢!
电脑的发展史,给您一说,立马缩水不少,不妨另行开辟话题。呵呵 !
!
好帖,正在学习GPS的使用,对我很有帮助,谢谢了!加分.
好帖!顶!学习!
楼主的贴,必然花了不少心血时间的了,好贴,自然要顶。。。。学习了!
400T能将老地图拍成的JPG随意放大缩小这点功能非常实用.
这个方法相当不错。下次在峡谷再找不到信号,就用TT加扁气充成气球放天上搜!
活学活用的好TX,脑子灵光,赞 !
!
真要是实施了,别忘了反馈一下。 很好玩的东东!